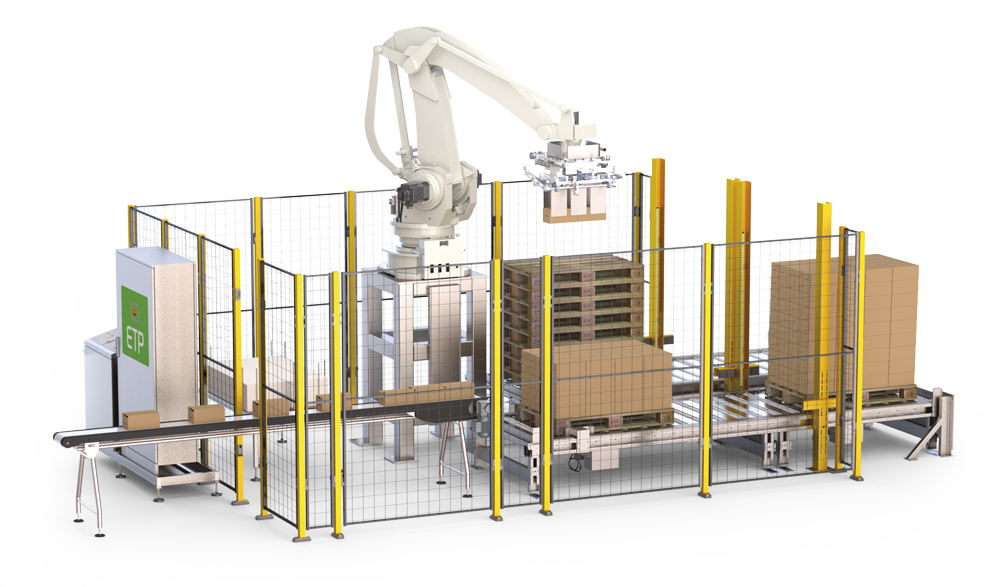



En quoi consiste un robot palettiseur ?
Aussi appelé palettiseur automatique, le robot palettiseur est une machine dotée d’un bras articulé avec une pince, capable de manipuler des cartons (caisses) pour les positionner idéalement sur un support palette, qui sera ensuite récupéré par les transporteurs en vue de leur acheminement vers vos clients ou fournisseurs. Il intervient donc après les phases successives d’emballage et de mise sous carton, grâce à une machine encaisseuse.
La palette est soigneusement préparée par la machine : le palettiseur automatique, grâce aux réglages préalablement effectués par l’opérateur, dispose les différents cartons en fonction de leur poids et de leurs dimensions pour que la palette soit la plus sécurisée possible lors du transport.
Pour être utilisé par l’opérateur, le robot palettiseur dispose d’un logiciel. Ce logiciel vous permettra de régler le palettiseur automatique pour que celui-ci exécute en toute autonomie les actions de saisie du carton acheminé par le convoyeur, son déplacement vers la palette, puis l’organisation de cette dernière.
Il ne restera plus qu’à procéder au banderolage pour sécuriser votre palette, ou bien d’insérer des intercalaires pour être certain que les cartons ne bougeront pas lors du transport.
Pourquoi faire confiance à un robot palettiseur ?
Le robot palettiseur offre des gains de productivité importants : une fois configuré à l’aide du logiciel par l’opérateur, le bras articulé du palettiseur enchaine les réceptions en sortie de convoyeurs pour procéder à la mise en palette selon vos réglages.
La mise sur palette est particulièrement précise grâce à la pince installée sur le bras, qui saisit parfaitement les cartons et les place à l’endroit exact que vous avez indiqué. La saisie par la pince est également soignée – et ne risque pas d’endommager le carton.
Enfin, le palettiseur automatique réduit également considérablement les risques de blessures et de pénibilité, tout en améliorant également la sécurité des opérateurs, qui peuvent se focaliser sur des actions de préparation et de contrôle.
Palettiseur automatique monoligne ou multiligne ?
L’intégration d’un palettiseur automatique à votre ligne de production et conditionnement requiert de l’espace. Si vos convoyeurs acheminent plusieurs cartons et produits qui peuvent être à destination d’une même palette, optez pour un robot palettiseur multiligne.
Une fois le logiciel configuré, le bras articulé et la pince saisiront les cartons en provenance des différentes lignes dans l’ordre que vous aurez indiqué, et les placeront dans la disposition que vous souhaitez. L’achat d’un palettiseur automatique multiligne au lieu d’un monoligne vous permet donc de libérer de l’espace – puisqu’un seul robot est placé pour procéder à l’ensemble des opérations demandées.
ET PACK, spécialiste de la palettisation
En parallèle de l’emballage et du convoyage des produits, ET PACK accompagne ses clients jusqu’en bout de ligne en vous proposant une solution automatisée, performante et sécurisée.
Ensemble, notre équipe définit en fonction de vos besoins, de votre organisation actuelle et de vos contraintes la meilleure solution possible pour palettiser vos cartons dans les meilleures conditions.
Demandez un devis pour l’installation d’un robot palettiseur
Gagnez du temps et améliorez le rendement et la productivité de votre ligne de production en optant pour l’ajout d’un robot palettiseur. Cette solution, qui répond à vos problématiques de productivité et d’organisation, permettra à votre entreprise de libérer son plein potentiel.
Notre service commercial se tient à votre disposition : remplissez notre formulaire de contact pour obtenir plus d’informations ou un devis détaillé au sujet de nos machines (prix, disponibilité, caractéristiques techniques …).